The second robot I designed for the First Tech Challenge Power Play season with my team, 9527 Rogue Resistance. This robot was my most complex yet, with a compact 12" x 12" drivetrain, only 5 motors, and a countersprung lift. Designed in PTC Onshape.
Accomplishments:
GEMS League Design Award • Central Texas North Semi-Regional Winning Alliance Captain •Central Texas North • Semi-Regional Control Award • Central Texas Finalist Alliance First Pick • Texas UIL State Championship Winning Alliance First Pick • Texas UIL State Championship Design Award • Texas State Championship Control Award Finalist

My Final Robot
Our lift used two constant-force springs to effectively cancel out the force of gravity on our lift.
Our lift could fully extend in under a second with only one motor powering it
Fully active claw.

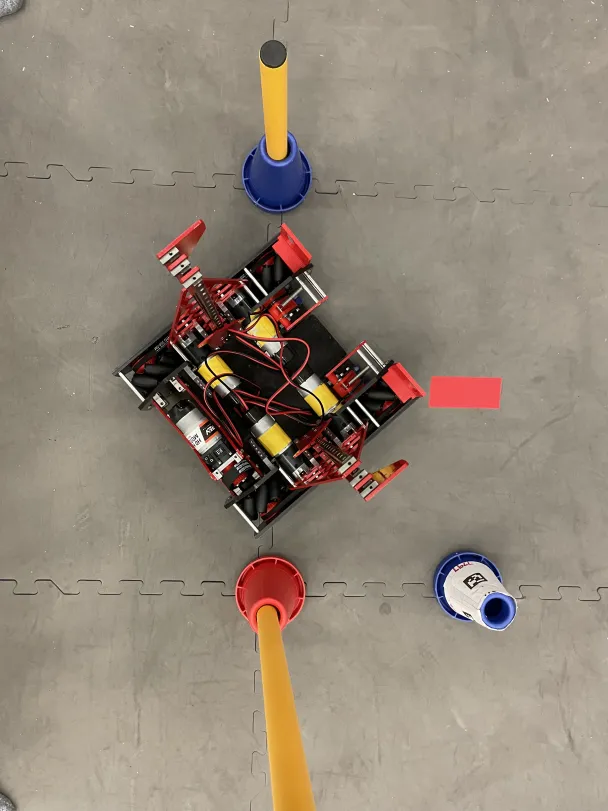
Autonomous run.
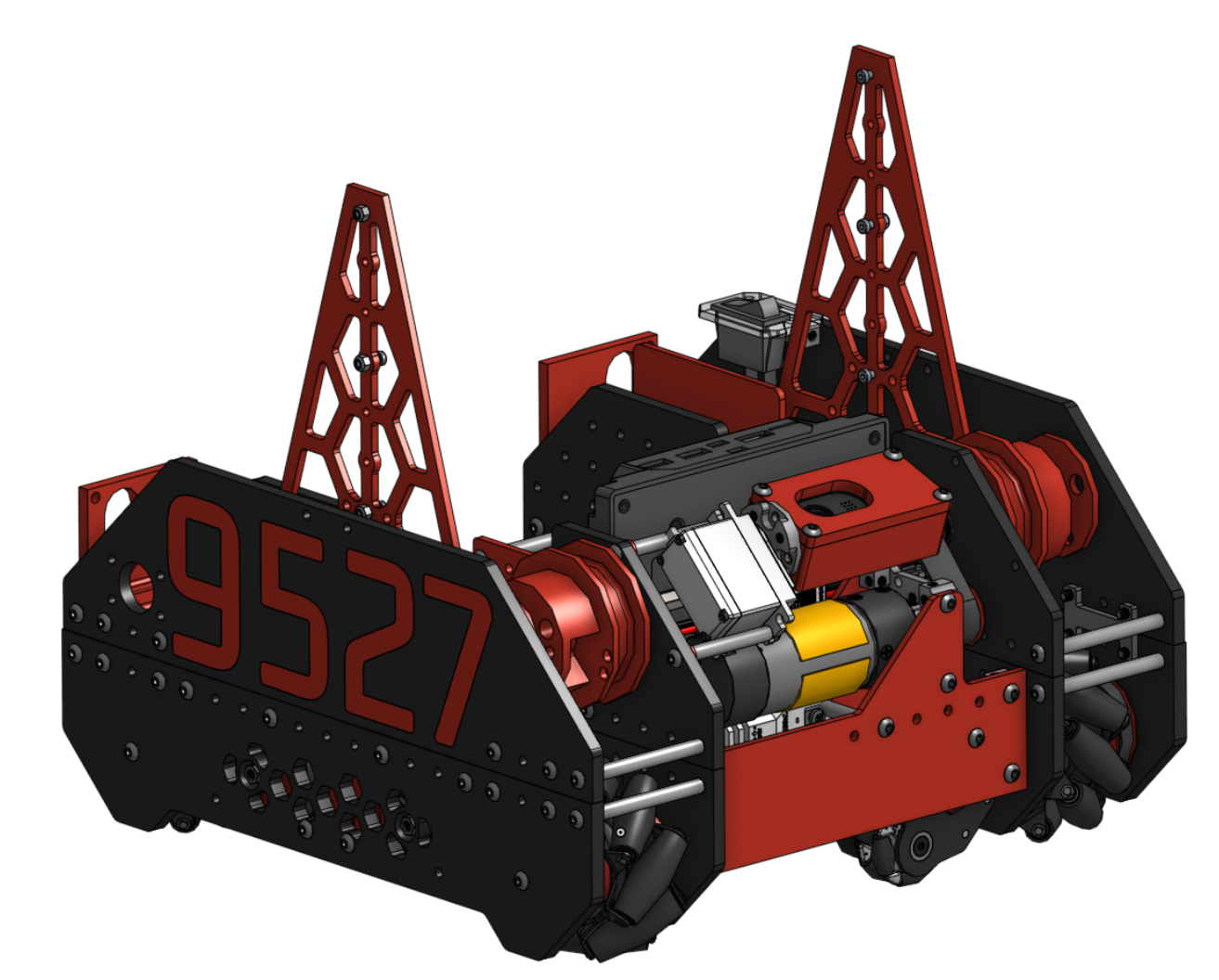
Our 12x12 drivetrain assembly
Our drivetrain could fit diagonally!
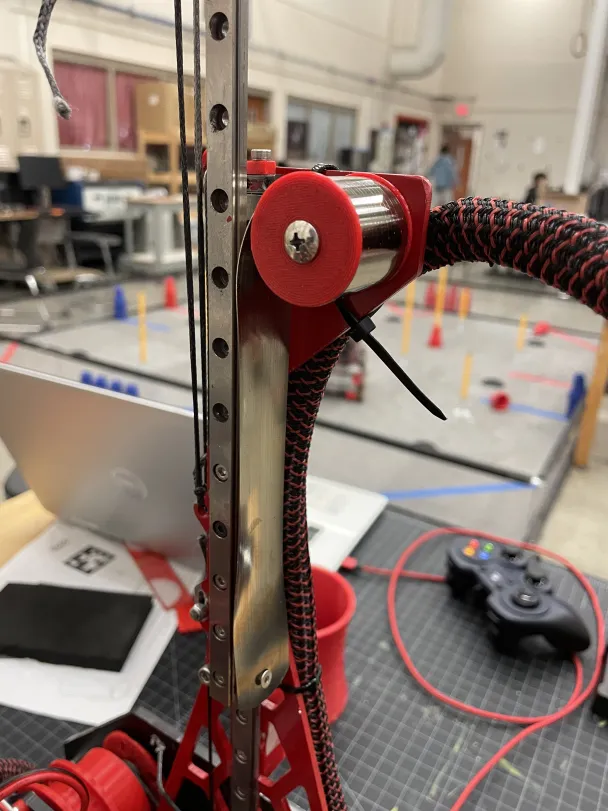
Our constant force spring setup
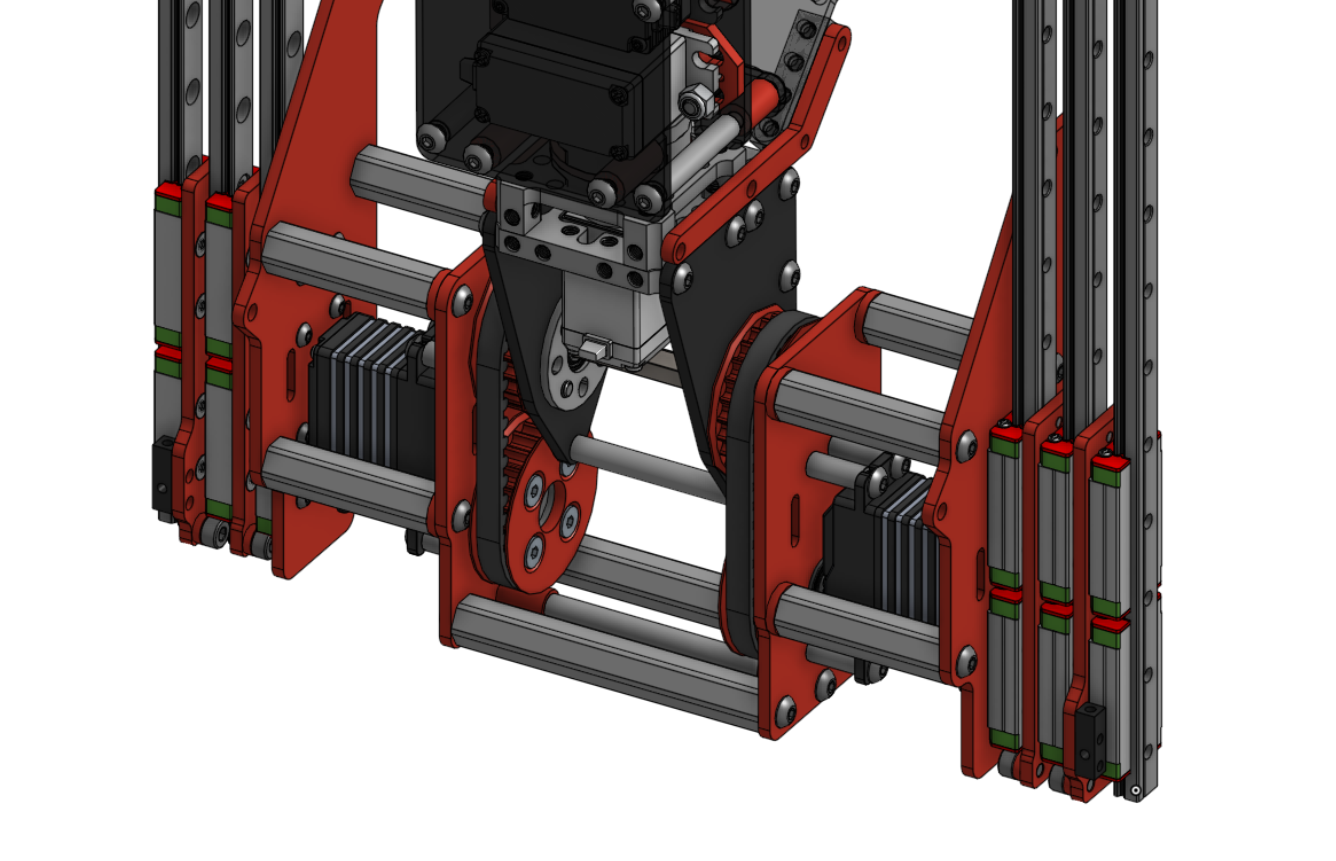
Instead of drawer slides, we used mgn9 steel rails.
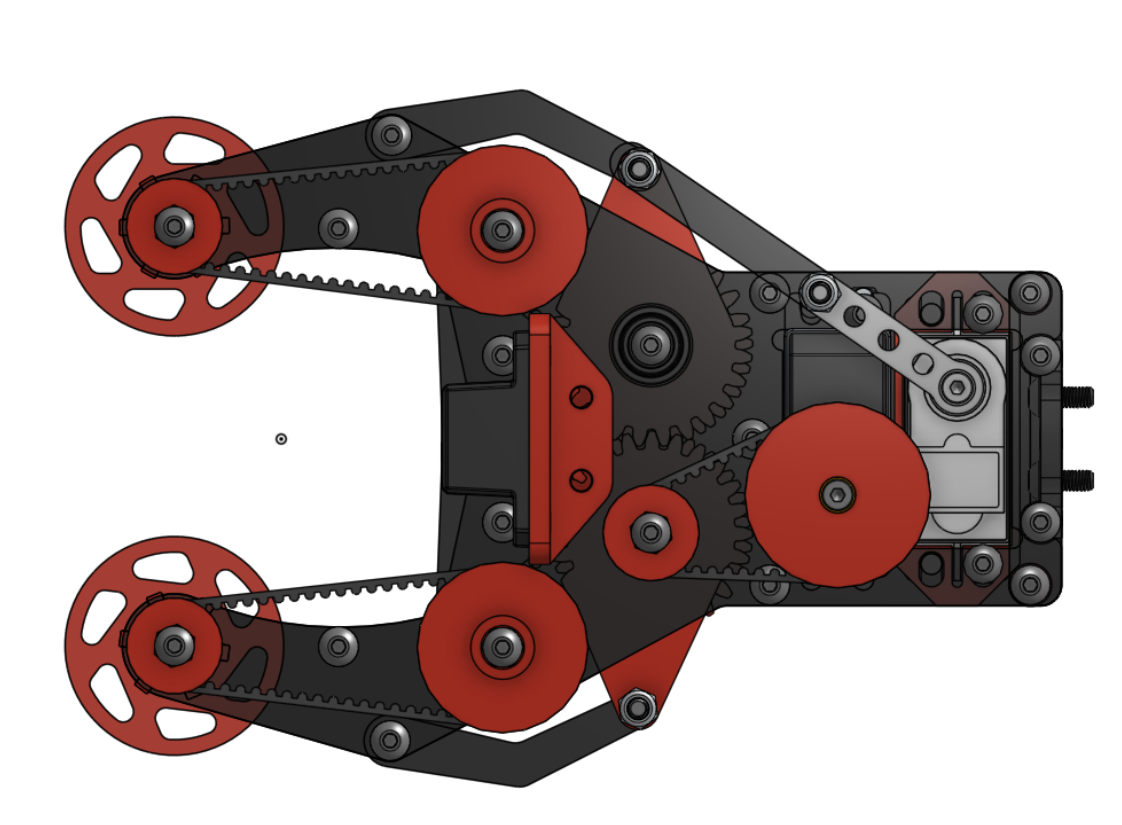
Our active claw was constructed out of machined polycarbonate.
Duck spin indicator
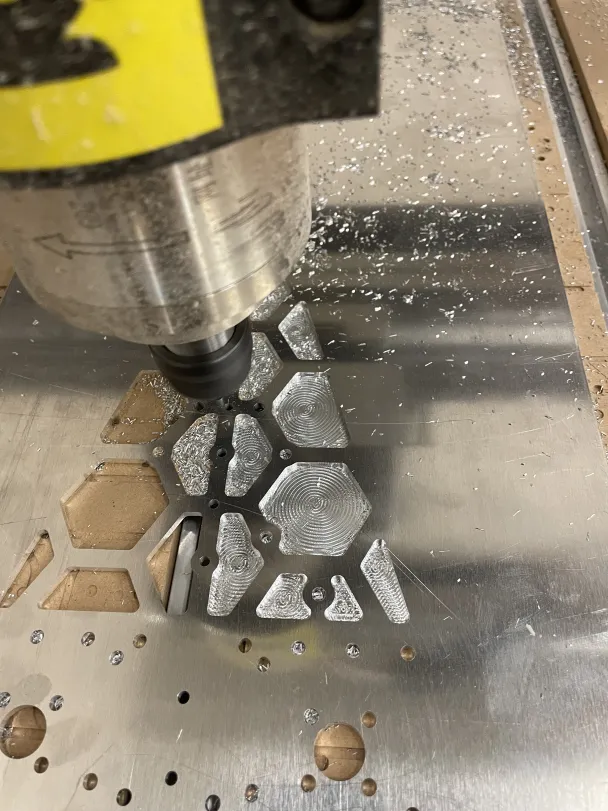
We routed all our parts
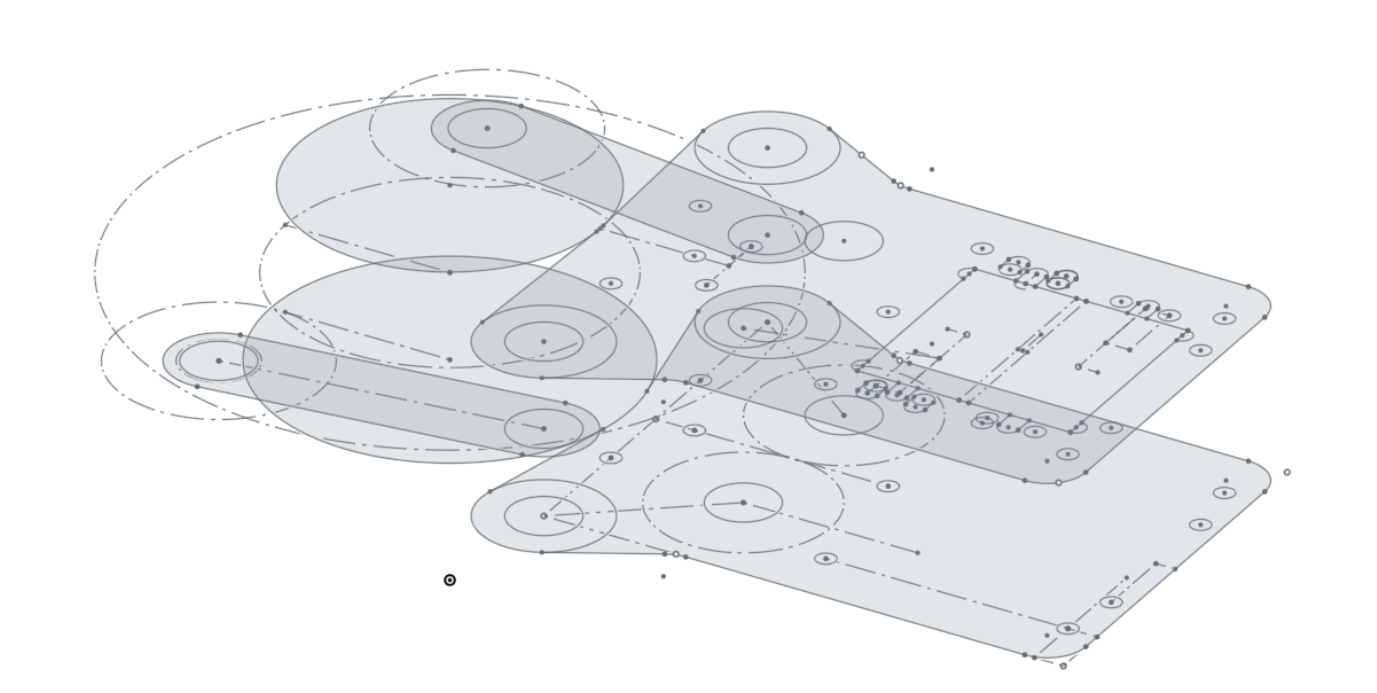
Master sketches for the claw.